Difference between revisions of "Teach Pendant Installation Guide/zh-hans"
| (2 intermediate revisions by 2 users not shown) | |||
| Line 1: | Line 1: | ||
| − | {{Languages}} | + | {{Languages|Teach_Pendant_Installation_Guide}} |
| + | <div id="BackToTop" class="noprint" style="background-color:; position:fixed; bottom:32px; left:95%; z-index:9999; padding:0; margin:0;"> | ||
| + | <span style="color:blue; font-size:8pt; font-face:verdana,sans-serif; border:0.2em outset:#ceebf7; padding:0.1em; font-weight:bolder; -moz-border-radius:8px; "> | ||
| + | [[Image:TOP2.png|50px|link=#top]] </span></div> | ||
= '''产品概述''' = | = '''产品概述''' = | ||
| Line 6: | Line 9: | ||
[[Image: product overview 1.1.png|500px]] | [[Image: product overview 1.1.png|500px]] | ||
| + | |||
| + | ==参考(如何连接简单的开关到CDHD): == | ||
| + | [[How to connect simple switch to CDHD|如何连接简单的开关到CDHD]] | ||
==示教器硬件== | ==示教器硬件== | ||
Latest revision as of 08:37, 23 October 2017
| 语言: | English • 中文(简体) |
|---|

Contents
产品概述
softTP示教器(TP)是用于基于软件的系统的附加工具。 它允许用户通过点动键移动机器人,并创建并运行用MC-Basic编写的完整机器人程序。 softTP触摸屏界面实现了快速简便的应用开发。

参考(如何连接简单的开关到CDHD):
示教器硬件
- 触摸屏
- 点动按钮
- 急停开关
- 控制开关
- 模式选择开关
- 电源板,以太网通讯和数字输出板
示教器软件
softTP提供了以下软件组件:
- Java执行引擎
- Java Web服务器(HTML到KMAPI转换器)和WWW文件夹(HTML文件和Java脚本)
- softTP许可证 (MCTP文件)
- softTP程序和库(MC-Basic源代码)
产品标签

安全
警告

|
用户有责任遵守使用机器人系统的所有安全准则和注意事项。 |
|
|
用户有责任根据安全标准和指导原则将紧急开关连接到机器人系统。 |
|
|
根据安全标准和指导原则,用户有责任将控制开关连接到机器人系统。 |
|
|
操作softTP示教器时,请务必用双手握住它。 softTP配有一个控制开关,以确保用户的安全。 除非在中间(使能)位置按住控制开关,否则不能操作示教器。 |
|
|
切勿使用胶带或其他方式保持控制开关的紧固。 这样做是非常危险的,因为它可能会阻止机器人在手动模式下停止 |
处理和维护
- 确保电缆安全,不能跳闸。
- 确保电缆不被其他物体弯曲或压扁。
- 确保布线不会与可能导致其磨损的尖锐边缘接触。
- 确保softTP不会以操作元件机械损坏的方式进行安装。
- 不要将softTP放置在高热源或阳光直射的地方。
- 避免softTP受到机械冲击,灰尘过多,潮湿或强磁场的损害。
- 不要在softTP上使用溶剂或研磨材料。清洁时请使用蘸有水或温和清洁剂的软布。
- softTP具有触摸屏。 只能用手指操作。 确保没有锋利的物体与屏幕接触。
规格
技术规格
| 项目 | 规格 |
|---|---|
| 处理器 | Intel®Atom™E3800/1.6 GHz 单核 |
| 内存 | DDR3 4 GB |
| NAND | SSD 32 GB |
| Rating | 12-24 VDC, 1-0.5 A |
| LCD 屏 | TFT LCD. 7-inch (163 x 104 mm). 分辨率800x480像素. Background lighting 24 LEDs. |
| 触摸屏 | 4线模拟电阻。 USB触摸控制器. |
| OS | Lubunto |
| LEDs | 3-color LED x 6 |
| SD/MMC | 外置SD卡 |
| USB | USB host |
| 键盘 | -)键. 4屏幕导航键。 4个功能键(未使用)。 |
| 开关 | 急停/模式选择/控制 |
| 通信端口 | RS232/RS485/Ethernet. Selectable |
| 运行环境 | 45°C max. ambient |
| 防护等级 | IP54 |
| 认证 | CE |
尺寸


接线
示教器电缆
示教电缆是softTP的一部分; 它不能分离。
TP电缆线分配表

TP电缆连接器 - 公接头

| 零件号 | A | ΦB | ΦC | ΦD | |
|---|---|---|---|---|---|
| SRC6A21-26P | mm | 98.0 | 31.0 | 20.4 | 12.2 |

电源板
TP上的电缆接线板 - 公接头

| 零件号 | A | ΦB | C(C') | D | E | F | G | |
|---|---|---|---|---|---|---|---|---|
| SRC6A21-26P | mm | 25.6 | 20.4 | 27.7 (25.5) | 14 | 2.3 | 32 | 26 |
 :
: 
IO电缆接口上夹板 - 引脚分配
例子: 连接CDHD
- 紧急停止和控制开关根据用户要求连接到系统的安全电路(STO,安全继电器)。

例子: 连接到DDHD
- 不同的输入顺序和没有紧急开关连接。绿线是桥梁; 红线和黑线来自外部来源。

急停开关
将紧急开关连接到机器人系统是用户的责任,并遵循所有必要的安全准则和注意事项。

模式选择开关

| 位置 | 符号 |
|---|---|
| 左边 | 
|
| 中间 | 
|
| 右边 | 
|
控制开关
将控制开关连接到机器人系统是用户的责任,并遵循所有必要的安全准则和注意事项。
自动按下或释放控制开关,立即停止所有轴的运动。

| 动作 | 位置 | 符号 | |
|---|---|---|---|
| 如果没有按下控制开关或按下太轻。
开关是关. |

|
Null | 
|
| 如果在正常压力下按下控制开关。
开关是开。 |

|
使能 | 
|
| 如果控制开关按压太重,
开关是关。 |

|
Panic | 
|
设置
硬件设置
下图显示了典型的系统配置。

- softTP通过示教器电缆连接到夹具板上。
- 夹具板:接受24 VDC电源(由用户提供); 通过以太网(RJ45)电缆连接到以太网交换机; 通过IO电缆(由用户提供)连接到驱动器或外部IO模块。
- 三个softTP开关 - 模式选择,紧急和控制 - 通过IO电缆(由用户提供)连接到驱动器或外部IO模块的数字输入。
- 紧急停止和控制开关根据用户要求连接到系统的安全电路(STO,安全继电器)。
软件设置
注意: IPK文件用于softMC 7系统; ZIP文件用于softMC 3系统。
使用ControlStudio软件,执行以下步骤:
- 安装Java执行引擎:
- 发送JREx.x.x_xxx.IPK / ZIP文件到softMC:
Tools > Firmware Update > File > Open. - 等待softMC重新启动(自动)。
- 发送JREx.x.x_xxx.IPK / ZIP文件到softMC:
- 安装Java Web Server和HTML(WWW文件夹)文件:
- 发送JAVA_FILES. .IPK/ZIP文件到softMC:
Tools > Firmware Update > JAVA_FILES.IPK > Open - 等待softMC重新启动(自动)。
- 发送JAVA_FILES. .IPK/ZIP文件到softMC:
- 安装和激活softTP许可证:
- 确保MCTP文件在ControlStudio工作目录中。
- 在ControlStudio终端中,输入以下内容:

- 重新启动系统。
- 在用户PC上,创建一组专用文件夹,该文件夹用于定义SoftTP操作的设置。
将示教器文件解压缩到该文件夹。
在ControlStudio文件管理器,找到并打开专用文件夹。
从PC文件列表(中间窗格)中选择并拖动所有MC-Basic示教器文件到控制器文件列表(右窗格)。
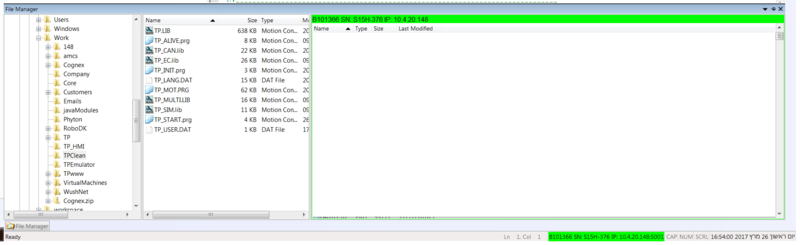
- 在控制器文件列表中,找到文件 TP_INIT.PRG.
选择并将文件从控制器文件列表拖动到PC文件列表。
双击打开TP_INIT.PRG在“终端”窗格中进行编辑。 - 编辑TP_INIT.PRG中的行以映射I / O并定义各种示教功能的相关值,如下所示:
- 设置控制开关和模式选择开关的数字输入编号:

- 定义示教器的类型(2个选项):

- 定义坐标系的类型(2个选项):

- 定义是否创建和维护日志文件(true或false):

- 如果启用了日志文件,请设置文件的最大大小:

创建并写入日志文件,直到达到最大大小。 写入时,将创建第二个日志文件并将其填充到最大大小。
一旦第二个文件被填满容量,日志将覆盖第一个日志文件。 - 定义示教器键盘的类型。 目前只有一种可用; 该行应如下:

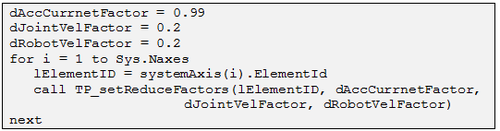
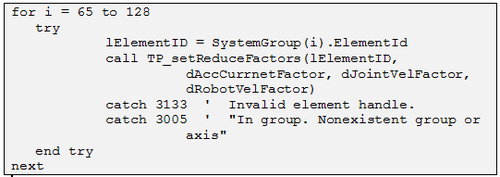
- 为了安全起见,设置每个运动元素(组和/或单轴)的速度,加速度和电流值。
调用每个运动元素ID的设置,如下所示:
- 设置控制开关和模式选择开关的数字输入编号:
- 保存TP_INIT.PRG并将文件发送到控制器(右键单击“复制到控制器”)。
- 在控制器文件列表中,找到文件 AUTOEXEC.PRG.
[或者,如果使用Configurator, 请使用文件 STARTPRG.PRG].
选择并将文件从控制器文件列表拖动到PC文件列表中。
双击以在终端窗格中打开AUTOEXEC.PRG进行编辑。
在程序结束时,添加行:





保存AUTOEXEC.PRG并将文件发送到控制器(右键单击“复制到控制器”)。
- 初始化softMC和TP。 在“终端”窗格中,输入以下命令:

[或者,如果使用Configurator, 请输入命令:].

- 在消息日志窗格中,检查以下消息:

softTP现在可以进行操作了。
浏览器设置
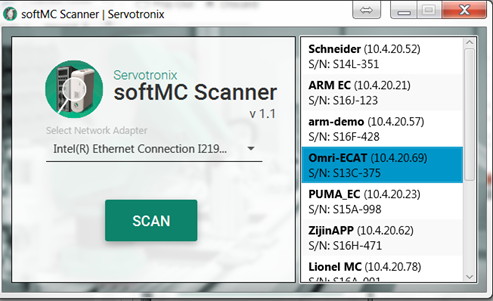
要在softTP上设置softMC的IP地址,您需要执行以下操作(注意,以下所有快照均来自softTP屏幕):
- 启动 softMC扫描器(从桌面)
- 选择网络适配器
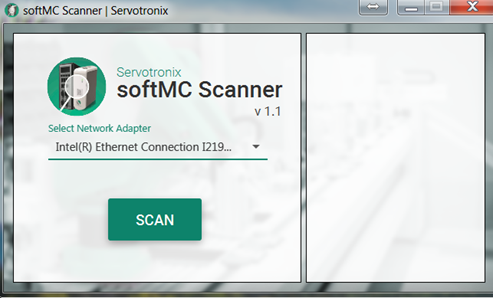
- 单击列表中的softMC在浏览器中打开,然后设为主页
- 转到firefox选项(菜单位于地址栏右侧):
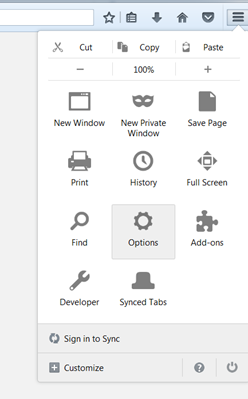
- 将主页更改为softMC的IP并关闭窗口。



附录
本附录介绍了使用TP仿真器软件代替实际软件的设置。
TP仿真器与softMC通信
当实际示教器不可用时,此配置对于真实的机器人系统非常有用。
在电脑或平板电脑上使用HTML5浏览器。
|
|
在没有安全开关的情况下工作是非常危险的。 在与机器人一起工作时,保持安全的距离(超出机器臂的范围)。 |
硬件设置

软件设置
为更好的配置软件,请参阅软件安装程序部分,然后执行以下操作:
- Step 1: Java执行引擎
- Step 2: Java Web服务器
- Step 3: softTP 许可证
- Step 4: TP库的MC-BASIC文件
- Step 5: TP_INIT.PRG 文件:
不要定义任何I/Os.
按如下所示定义示教器和键盘类型:

- 在浏览器中,调用文件emulator.html(而不是index.html)。
例如:10.4.20.148/emulator.html
TP仿真器与虚拟(模拟)SoftMC通信
该配置对于使用完全模拟的机器人系统是有用的。
相同或不同的PC上使用HTML5浏览器。
硬件设置

软件设置
为更好的配置软件,请参阅软件安装程序部分,然后执行以下操作:
- Step 1: Java执行引擎
- Step 2: Java Web服务器
- Step 3: softTP 许可证
- Step 4: TP库的MC-BASIC文件
- Step 5: TP_INIT.PRG 文件:
不要定义任何I/Os.
按如下所示定义示教器和键盘类型:
- 在浏览器中,调用文件emulator.html(而不是index.html)。
例如:10.4.20.148/emulator.html