Time Based Profile (Trapezoidal Acceleration)/zh-hans
| 语言: | [[::Time Based Profile (Trapezoidal Acceleration)|English]] • [[::Time Based Profile (Trapezoidal Acceleration)/zh-hans|中文(简体)]] |
|---|
Contents
概述
本文档介绍了ControlStudio中的新运动分析器。 为了了解新的分析器的特性,我们首先描述当前的分析器实现。
两个分析器基本上都是在路径生成期间改变状态的状态机,并且基于每个状态使用不同的公式来计算分析器输出(位置,速度,加速度)。 这些状态是:加速度增加,加速度饱和,加速度减小,零加速度。可以在运动期间重复一些状态(例如,加速状态,然后是减速状态),并且可以完全省略一些状态(例如,在短暂运动中为零加速)。
这两个分析器之间的主要区别是状态选择算法,即系统从一个状态切换到另一个状态的条件。当前的实现(自版本4.5.25起的固件)主要以速度为基础。这意味着当前速度值是分析器切换到另一状态的主要标准。然而,速度值还不够,因此还要使用附加的内部变量:相位角,目标距离,分析器状态。


新的分析器(自版本4.5.25起)具有仅基于一个变量(当前时间)的状态变化条件。 离线预计算(这两个分析器都是共同的)将预先计算每个状态的切换时间,这将在状态改变时给出一个简单的条件。
这种方法比基于速度的分析器提供了一些好处。 其中之一是采用 safe SP blending feature.
| 基于时间的分析器 | 基于速度的分析器 | |
| RTK load | 非常小,因为没有检查制动距离 | 在每个采样中检查制动距离。 |
| 时间离散化 - 样本落在不同阶段之间 | 无,因为(p,v,a)值仅在当前时间值上计算 | 我们需要分别计算每个阶段,然后减去 |
| 轻松在线改变目标点 | 需要全部重复预计算 | 由于制动距离总是被检查,所以它相对来说比较麻烦。 |
| 时间驱动事件(即,在特定时间实例(在达到目标点之前)定义事件) | 一个简单的内置功能 | 非常不便于实施,因为我们实际上不知道运动的总执行时间 |
| 总执行时间的预测(例如,在SP混合中,防止第二运动在第二次完成之前进入) | 一个简单的内置功能 | 非常不便于实施,因为我们实际上不知道运动的总执行时间 |
实施细则
语言接口
系统原本只支持两种类型的运动曲线:正弦加速度(SA)和梯形加速度(TV)。用户通过定义平滑因子选择运动曲线:0 - TV,其他一切都是SA配置文件。这是非常直观的,因为梯形加速度(TV)是用户可以选择的最不平滑的配置文件(种类简单)。但是,这对于定义其他配置文件类型非常不方便。 因此引入了新的属性:
<ELEMENT>. PROFILERTYPE
分析器特性

第一个基于时间的分析器实现的是梯形加速度曲线。 基于时间的分析器提供平滑的速度和位置曲线(“S”曲线)。 与正弦加速度曲线相比,该曲线对于相同的加速度具有减小的加加速度值,并且在加速度曲线中具有一个更多的加加速度不连续点。 然而,考虑到加加速度值也大约降低了三倍(3.14倍),可以假设两个曲线基本相同。 将TA转换为TV是通过减少加速度增加时间到比运动采样时间更短来完成的,与SA轮廓相反,这种变换有时默认地进行(加速时间小于5个样品)。 在该曲线类型中,通过J / A> T保证速度平滑度。

反作用:
The proposed profile (TA) is not able of having a non-zero initial and/or final velocity. This constrain causes the following limitations on use of ProfileType=2:
- The execution of VORD change will be postponed to the first motion entered after its change, i.e., there is no on-line change of velocity command.
- Motion with StartType immediate or fast-immediate is be not allowed with this profile.
- In SP-Blending mode, it will be relatively simple to add a feature that prevents entering a third movement before the second one is complete.
- The new profiler allows introducing time-events prior to motion end.
- Concatenation (Vfinal ≠ 0) – not possible as this type of profiler does not accept nonzero initial and/or final velocities.
- BlendingMethod = 1 (Continuous Path) is not be functional with (PrfType = 2). In this case blending is done in profile-following mode where only one motion executes profile and the other just follows it:
- BlendingMethod = 2 (Super-Position) is fully operational.
- BlendingMethod = 3 (AI) is fully functional and independent from selected profile type.
New blending properties
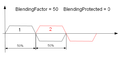
Illustration 4: BlendingFactor = 50 BlendProtected = 0

Illustration 5: BlendingFactor = 50 BlendProtected = 60

Illustration 6: BlendProtected = 40 and BlendProtected = 0

Illustration 7: BlendingStartCondition=0 and BlendingStartCondition=1



Coding Issues
Time Based profiler will have three different functional part and this is the same way we have today with the default Velocity based profile:
- Pre-Computation, part where the given user parameters of velocity, acceleration and jerk are transformed into actual operational values.
- Real-time executioner that is called each sampling period and produce next (position, velocity, acceleration) triple.
- Inverse profiler function, routine that computes internal profiler parameter based on given position inside profiler path. In velocity based profile this function is non-trivial, in time based profile this function is much simpler and will be in the form of . This ability is crucial in implementing BlendProtected feature of the SP blending.


See Also
--Mirko 08:22, 20 December 2010 (CET)