Difference between revisions of "AXY:path-PLS"
| Line 1: | Line 1: | ||
| − | <big><span style="color: red">'''Replaced by NEW PLS article - [[Programmable Limit Switch | + | <big><span style="color: red">'''Replaced by NEW PLS article - [[Programmable Limit Switch]]'''</span></big> |
<strike> | <strike> | ||
Latest revision as of 11:17, 16 October 2018
Replaced by NEW PLS article - Programmable Limit Switch

Contents
Introduction
The path-PLS is associated with the motion nodally. Thus, instead of enabling/disabling using the command PLSEnable, the PLS will be automatically enabled at motion start and disabled at motion end. The motion path distance from the motion start, along the motion path, is the PLSsource variable of the PLS. Depending on the various interpolation modes, different PLSsource variables can be used:
- Path length in position user units (e.g., mm) In case of straight line (MOVES) motion it is just a distance for the starting position. In case of joint interpolated motion (MOVE) there is no physical meaning of such a distance and in circular interpolation, we can choose between arc length and the angle from the starting point.
- Percentage of the motion path from the start. This variable has the advantage that it is universal , means that it can be used in all motion types. However it has no physical meaning. Percentage can be very useful in motions having dominant orientation part.
- Time elapsed from the motion start. This can be useful in certain application but can be applicable in time-based profiles only (PrfType = 2).
- X,Y,Z coordinate. This is somehow a combination of path length and the percentage of the path, it has an advantage that it is a comfortable way of implementing application constrains. Also it can be applied to any type of motion interpolation. However, using it can cause multiple triggering of a same PLS position during one movement.
| NOTE | |
- All properties and behaviors of the path-PLS are identical to the regular PLS except when it is explicitly noted.
- Contrary to the one-dimensional PLS, the path-PLS can be triggered using command values only. There are no feedback path-PLS sources.
- Due to the complex nature of advanced interpolation path forms, the path-PLS is not applicable to these interpolation types.
- The user must set the PLS output to the initial state. From then on, when the PLS is enabled, it will toggle the output. Disabling PLS does not affect the state of the digital output in any way.
Implementation
Path-PLSs can be defined in the same way as one-dimensional PLS. Contrary to the one-dimensional PLSs the path-PLS can be activated only when explicitly given in a movement statement. Some of Axis.PLSSource are especially to the path-PLS.
PLS Properties and Commands
Common Shared <pls> as PLS {<element>} <io> {Hwassistance = on/off}
Command for PLS language object definition. Can get an element as robots or groups. Joint-based or non-robot based PLSs are not allowed. Path-PLSs are PLSs defined on elements that are robots and not axes.
Enabling of path-PLS is done through nodal assignment only. Thus, setting this variable will return an error except when PLSsource = XCOO/YCOO/ZCOO. Querying this value will return the current state of a path-PLS depending on the movement being executed.
Behaves the same as the regular PLS, but works on the selected PLSsource instead of the axis position.
Flag used by oriented PLS-sources to define whether the PLSposition[*] is computed relative to the start(0) or to the target(1). For example, in PathLength it indicates whether the length is measured from the start or from the end of the motion. Default value is 0. If nothing is specified, all path-specific variables will be computed from the start.
PLSSOURCE
The following table summarizes the types of PLSSource.
| Source Name | One-dimensional PLS |
Path-PLS | Description | During Blending |
Related to Start/Target |
| POSITIONCOMMAND | ✓ | no | Axis position command | Coordinate | No |
| POSITIONFEEDBACK | ✓ | no | Axis position feedback | ||
| POSITIONEXTERNAL | ✓ | no | External position | ||
| Setpoint1 | no | ✓ | X axis position (SetPoint{1} value). | ||
| Setpoint2 | no | ✓ | Y axis position (SetPoint{2} value). | ||
| Setpoint3 | no | ✓ | Z axis position (SetPoint{3} value). | ||
| PathLength | ✓ | ✓ | Length of the path in user units. | Single | Yes |
| PathPercentage | ✓ | ✓ | Percentage of the path. | ||
| PathTime | ✓ | ✓ | Time duration in ms. |
Nodal assignment of path-PLS used for enabling path-PLS during motion. The WithPLS command specifies the PLSs that will be enabled during execution of the given motion and disabled when the motion ends.
Related Properties and Commands
- PLSENABLE
- PLSREPEAT
- HWASSISTANCE
- PLSHYSTERESIS
- PLSAXISNAME
- PLSELEMENTNAME
- PLSPropagationEnableDelay
- PLSPropagationDisableDelay
- PLSPropagationDelay
- PLS On/Off delay
- HWIOtime
- PLSOUTPUT
- PLSPOLARITY
- PLSPOSITION
- PLSdelaytime
- CREATEPLSDATA
- DELETEPLS
- PLSLIST
Path Percentage and Path Length
PLSsource can be PATHPERCENTAGE and PATHLENGTH. These are special types of position sources, both discontinuous variables that changes their values abruptly at the point where two movements are executed one after another.
Example: PATHPERCENTAGE
MOVE A PLSSOURCE 0→100 MOVE B PLSSOURCE 0→100
At point A the source changes its value from 100 to 0.
Example: PATHLENGTH:
MOVE A PLSSOURCE 0 → L1 MOVE B PLSSOURCE 0 → L2
At point A the source changes its value from L1 to 0.
During joint-interpolated (MOVE) movements PathLength is not relevant since the physical dimensions of such a variable are non-existent. However, the option of using PathPercentage remains. For PathLength descriptor, if the units are not homogenous, the value in aggregate units is used. For CIRCLE interpolation this will be the angle on the circle-arc from the starting point.
For PathPercentage all values of PlsPosition[], PlsHysteresis and PlsRepetition are in percentage units on a scale of 0 to 100. All values that are negative or above 100, are used as 0 or 100.
Every local PLSSource can cause a change in I/O state at the start of the movement depending on the PLSPolarity definition (see PLSPOLARITY). The I/O will appear at the first sample of the movement without time delay, meaning that PlsDelayTime[0] or HWIOtime[0] will be equal to 0.
| NOTE | |
| In an instance of two movements in which the first ends with VFinal > 0, there will be no setting to !PLSPolarity at the start of the followed movement. The next toggling is done at the first PLS position of the second movement (see Example 7 below). |
PathTime
The time-based source is applicable in time-based profiles only prftype=2, else an error is returned.
| NOTE | |
| There are two categories of PLS-sources coordinate and single. The only difference is observable during blending. The coordinate PLS-sources trigger the PLS output once per PLS-condition independently how many individual motions caused it. The single PLS-source trigger the PLS output as many times as the number of movements involved in the blended motion (could be maximally 2) |
| NOTE | |
| In case of PLSsource from type length, percentage or time there is no continues in toggling no matter if the PLS was global enabled using PLSEnable or local using WithPLS. |
Setpoint1, Setpoint2, Setpoint3
SetPoint sources are the virtual Cartesian axes, defined in the robot world frame (i.e., setpoint). Not relevant for Group without a defined kinematics. Those sources can be tracked independently at a specific movement (using PLSEnable ).
During Conveyor Tracking, values of Setpoint1, Setpoint2, Setpoint3 will assume values on absolute robot coordinates (i.e., setpoint, here) and not robot frame coordinates moving with the robot.
During joint-interpolated (MOVE) movements, values of Setpoint1, Setpoint2, Setpoint3 will be linearly interpolated between the samples. Therefore, depending on the sample rate and velocity, an interpolation error may occur.
PLS Tracking During Proceed Command
PLSSource can be defined as global or local, and as absolute or relative.
- Absolute - PLSSources that are positions in the spcase - PCMD , PFB, SetPoint1, SetPoint2 and SetPoint3.
- Relative - PLSSources that depend on the current movement as PLSLength, PLSPercentage and PLSTime.
- Global - PLSSources that are operated by the command PLSEnable.
- Local - PLSSources that are connected to a specific movement, meaning they are operated by the command WithPLS.
The following table shows how the PLS will be tracked during proceed command:
| PLSSource | Absolute | Relative |
| Global | Tracking | Track will start from first PLS position at the buffer. |
| Local | Tracking | No tracking as the original path is no longer relevant. |
Notes
| NOTE | |
| Path-PLS feature is not applicable for JOG, DELAY , PASS and DOPASS commands. An error will be returned. |
| NOTE | |
| Stop command disables all PLSs given in the currently executing motion. |
Refer to: PLS Timing Issues
Examples
Example 1
Using length of the path (distance from starting point) for the position source. Note the default value of PLSRelateTo is zero, therefore all given PLSposition values are computed from the motion start.
common shared GXY as group of axnm = A1 axnm = A2 of XY
common shared P1 as pls GXY Sys.Dout.1
common shared P2 as pls GXY Sys.Dout.2
common shared P3 as pls GXY Sys.Dout.3
CreatePLSdata 2 P1
CreatePLSdata 2 P2
CreatePLSdata 2 P3
P1.plsposition[1] = 10
P1.plsposition[2] = 90
P2.plsposition[1] = 10
P2.plsposition[2] = 90
P3.plsposition[1] = 10
P3.plsposition[2] = 90
GXY.PLSsource = PathLength
GXY.en = 1
MOVES {100,0} WithPLS = P1
MOVES {0,100} WithPLS = P2
MOVES {0,0} WithPLS = P3

Example 2
Using Cartesian axis limits for position source (Setpoint1).
common shared GXY as group of axnm = A1 axnm = A2 of XY
common shared P1 as pls GXY Sys.Dout.1
CreatePLSdata P1 2
P1.plsposition[1] = 10
P1.plsposition[2] = 100
GXY.PLSsource = Setpoint1
GXY.en = 1
MOVES {0,0}
MOVES {200,200} WithPLS = P1
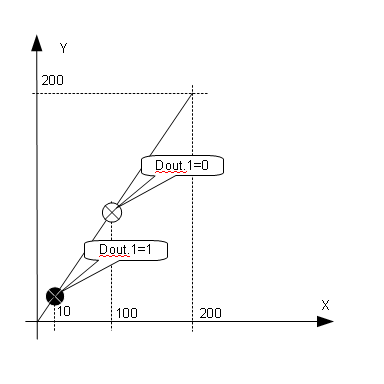
DOUT 1 is triggered when the path passes value X = 10 and X = 100

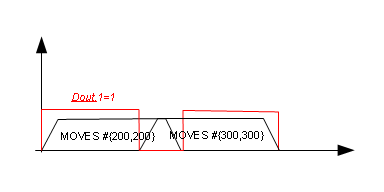
Example 3
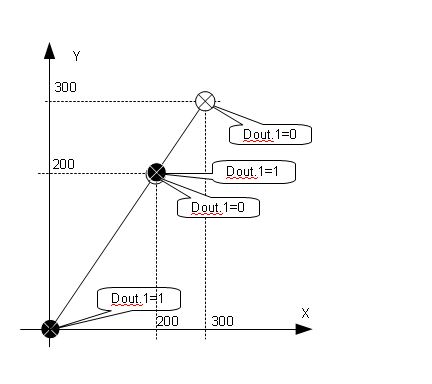
Using path percentages to switch on/off an output during the motion. Two PL-positions are defined: one at 0% (motion start) and one at motion end (100%). Practically, this means the output will be ON during execution of the entire motion and will be switched OFF at the motion end. The default value of PLSRelatedTo determines that the percentage is calculated from the motion start.
common shared GXY as group of axnm = A1 axnm = A2 of XY
common shared P1 as pls GXY Sys.Dout.1
CreatePLSdata P1 2
P1.plsposition[1] = 0
P1.plsposition[2] = 100
GXY.PLSsource = PathPercentage
GXY.en = 1
MOVES {0,0}
MOVES {200,200} WithPLS = P1

Example 4
Switching between two movements (not blended). If two motions with the same PLS are executed one after another, the PLS will be switched OFF within duration of one sample where the path-percentage changes from 100% (first motion) to 0% (second motion). The PLS remains enabled throughout the execution of the motion.
common shared GXY as group of axnm = A1 axnm = A2 of XY
common shared P1 as pls GXY Sys.Dout.1
CreatePLSdata P1 2
P1.plsposition[1] = 0
P1.plsposition[2] = 100
GXY.PLSsource = PathPercentage
GXY.en = 1
MOVES {0,0}
MOVES {200,200} WithPLS = P1
MOVES {300,300} WithPLS = P1
At start of the first motion the output is switched ON, at its end it is switched off. Immediately after it the first sample of the second motion will switch the output back on and the output will be ON all the time until the second motion ends.
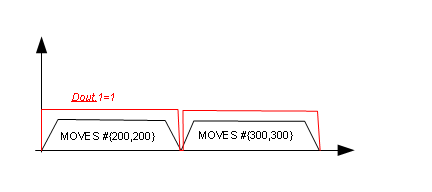
At the last sample of the first motion the output is switched off. And at the first sample of the second motion the output is switched on again.


Example 5
Switching between two blended movements.
The example shows the system behavior when the PLS-Source is of single type. During actual blending (time when two motions are executed simultaneously) the system considers two independent variables passing the given PLS values (simultaneously).
- path length (or a percentage of it) of the first motion is checked if passing the PLSpositions
- path length (or a percentage of it) of the second motion is checked if passing the PLSpositions
Thus, if two motions with the same PLS (having pos. on 0%,100%) are blended, the PLS output will be switched OFF during the "double movement" phase (when both motions are superposed/blended).
common shared GXY as group of axnm = A1 axnm = A2 of XY
common shared P1 as pls GXY Sys.Dout.1
CreatePLSdata P1 2
P1.plsposition[1] = 0
P1.plsposition[2] = 100
GXY.PLSsource = PathPercentage
GXY.BlendingMwthod = 2
GXY.BlendignFactor = 90
GXY.en = 1
MOVES {0,0}
MOVES {200,200} WithPLS = P1
MOVES {300,300} WithPLS = P1
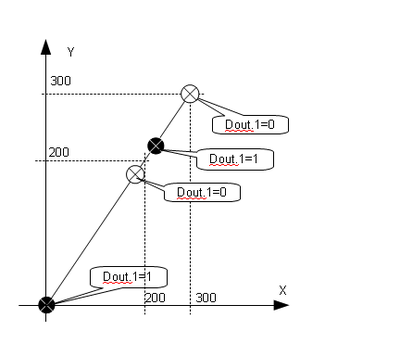
Output is switched off (toggled) at the beginning of the second motion (before the first is finished) and toggled back on by the end of the first motion.
AT the beginning of the double-motion phase thee PLS triggered by the beginning of the second movement is switching the output OFF. The end of the first motion that coincident with the double-motion end switches the output back ON (toggle).


Example 6
Switching the PLS on same distance from beginning and the end of the motion.
common shared GXY as group of axnm = A1 axnm = A2 of XY
common shared P1 as pls GXY Sys.Dout.1
common shared P2 as pls GXY Sys.Dout.2
common shared P3 as pls GXY Sys.Dout.3
CreatePLSdata P1 2
CreatePLSdata P2 2
CreatePLSdata P3 2
P1.plsposition[1] = 10
P1.plsposition[2] = 70
P1.plsRelatedTo = 0
P2.plsposition[1] = 10
P2.plsposition[2] = 70
P2.plsRelatedTo = 1
P3.plsposition[1] = 10
P3.plsposition[2] = 70
P3.plsRelatedTo = 0
GXY.PLSsource = PathLength
GXY.en = 1
MOVES {100,0} WithPLS = P1
MOVES {0,100} WithPLS = P2
MOVES {0,0} WithPLS = P3
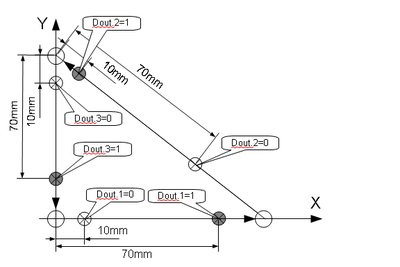
Switching the output 10mm or 70mm after start point or before target depends on plsRelatedTo definition.

Example 7
Shows the difference in serial movement once that are blend with Vfinal>0 . In both cases the PLSsource is from type percentage.
Serial movements with VFinal > 0
common shared pathpls as pls GXY sys.DOut.1 HWAssistance = TRUE
createplsdata 1 pathpls
pathpls.plsposition[1] = 100
pathpls.plspropagationdelay = 0
pathpls.plspolarity = 0
plssource = pathpercentage
sys.DOut.1 = 0
move {100,100} vcruise = 100 vfinal = 100
move {100,0} vcruise = 100 vfinal = 100 withpls = pathpls
circle angle = -90 circlecenter = {0,0} vcruise = 100 withpls = pathpls
 Shows axes pcmd , IO (X20) and PLSEnable(X40)
Shows axes pcmd , IO (X20) and PLSEnable(X40)
Serial movements with VFinal = 0
common shared pathpls as pls GXY sys.DOut.1 HWAssistance = TRUE
createplsdata 1 pathpls
pathpls.plsposition[1] = 100
pathpls.plspropagationdelay = 0
pathpls.plspolarity = 0
plssource = pathpercentage
sys.DOut.1 = 0
move {100,100} vcruise = 100
move {100,0} vcruise = 100 withpls = pathpls
circle angle = -90 circlecenter = {0,0} vcruise = 100 withpls = pathpls
 Shows axes pcmd , IO (X20) and PLSEnable(X40)
Shows axes pcmd , IO (X20) and PLSEnable(X40)
See Also: ConcatenationOfMovements