Difference between revisions of "AXY:Rod forces model for Delta kinematics/Verification"
(Moved from TestWiki) |
m (Arwiebe moved page CNT:Rod forces model for Delta kinematics/Verification to AXY:Rod forces model for Delta kinematics/Verification) |
||
| (2 intermediate revisions by the same user not shown) | |||
| Line 8: | Line 8: | ||
<gallery widths=300px heights=200px caption="Rod forces (effective) for motions in main directions (Z-level 800mm)"> | <gallery widths=300px heights=200px caption="Rod forces (effective) for motions in main directions (Z-level 800mm)"> | ||
| − | File:Rod forces model for Delta kinematics - Verification X-direction (3D graph).png|X-direction | + | File:Control;Rod forces model for Delta kinematics - Verification X-direction (3D graph).png|X-direction |
| − | File:Rod forces model for Delta kinematics - Verification Y-direction (3D graph).png|Y-direction | + | File:Control;Rod forces model for Delta kinematics - Verification Y-direction (3D graph).png|Y-direction |
| − | File:Rod forces model for Delta kinematics - Verification Z-direction (3D graph).png|Z-direction | + | File:Control;Rod forces model for Delta kinematics - Verification Z-direction (3D graph).png|Z-direction |
</gallery> | </gallery> | ||
| Line 54: | Line 54: | ||
== Limitation of acceleration/deceleration == | == Limitation of acceleration/deceleration == | ||
| − | [[File:Rod forces model for Delta kinematics - Verification of acceleration limitation.png|1000 px]] | + | [[File:Control;Rod forces model for Delta kinematics - Verification of acceleration limitation.png|1000 px]] |
In this section the goal it to verify that the rod forces do not exceed the maximal allowed value. | In this section the goal it to verify that the rod forces do not exceed the maximal allowed value. | ||
Latest revision as of 14:18, 24 December 2012
Effective rod force
For better presentation of results, effective rod force is introduced as:

In this way the load capacity reduction is included in the rod force.
Rod forces model
- Rod forces (effective) for motions in main directions (Z-level 800mm)
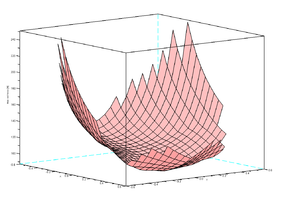
X-direction
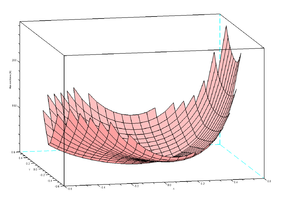
Y-direction
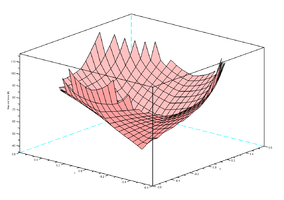
Z-direction
.png)
.png)
.png)
The graphs above are created using the following aico.motionAnalyser script.
fAcc = 100; // Acceleration [m/s^2]
cfAccDir = [1; 0; 0]; // Moving direction
fZ = 0.800; // Z level [m]
DeltaDR1200 = delta_newDR1200_4S();
RecPDm = record_new('PDm', [0; 0; 0]);
RecPDDm = record_new('PDDm', fAcc * (cfAccDir / norm(cfAccDir)));
[mfXmesh, mfYmesh] = meshgrid(-0.600:0.05:0.600, -0.600:0.05:0.600);
mfZmesh = zeros(mfXmesh);
for iI = 1 : size(mfXmesh, 1)
for iJ = 1 : size(mfYmesh, 2)
if (norm([mfXmesh(iI, iJ); mfYmesh(iI, iJ)]) > 0.600) then
mfZmesh(iI,iJ) = %nan;
continue;
end
RecPm = record_new('Pm', [mfXmesh(iI, iJ); mfYmesh(iI, iJ); fZ]);
[RecQRad, RecQDRad, RecQDDRad] = delta_inverseKinematics(DeltaDR1200, RecPm, RecPDm, RecPDDm);
RecTcmd = delta_inverseDynamics(DeltaDR1200, RecQRad, RecQDRad, RecQDDRad, RecPm, RecPDm, RecPDDm);
[RecRF, RecRed, RecRFeff] = delta_rodForces(DeltaDR1200, RecQRad, RecQDRad, RecQDDRad, RecPm, RecPDDm, RecTcmd);
mfZmesh(iI,iJ) = max(record_getData(RecRFeff));
end // iJ
end // iI
figure_new('Z level: ' + string(fZ));
mesh(mfXmesh, mfYmesh, mfZmesh);
Limitation of acceleration/deceleration

In this section the goal it to verify that the rod forces do not exceed the maximal allowed value. To achieve this typical robot motions (adapted from real applications) are recorded and the rod forces are computed in aico.motionAnalyser.
The graph shows that the rod forces during motion are within narrow tolerance.