PUMA robot/zh-hans
| 语言: | English • 中文(简体) |
|---|
Contents
PUMA机器人
PUMA机器人是以下关节的六自由度关节机器人:

耦合
在Staubli RX机器人系列中,轴5和6之间存在机械耦合。机器人的耦合矩阵由以下定义:

RX90 工作空间
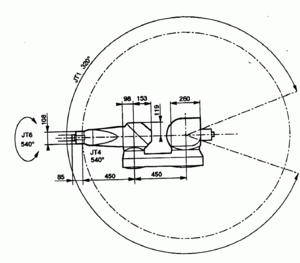
从上方看的Puma的工作空间
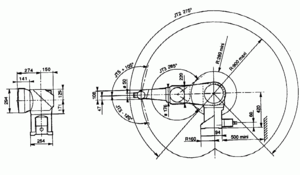
从侧面看的Puma的工作空间
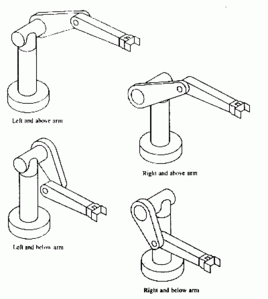
Puma机器人Lefty-Righty配置



PUMA WORLD工作空间受关节限制和以下附加笛卡尔边界的限制,可供用户使用:
- RMAX – 笛卡尔点的最大半径(), 不允许超出该半径的点。
- RMIN - 笛卡尔点的最小半径(). 不允许超出该半径的点。
- ZMIN –z坐标的机器人基面。这个平面以下的任何点都不允许。

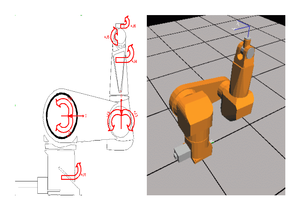
机器人配置
每个机器人位置可以在至少8个不同的关节位置实现(该数量可以更大的计数,也可以通过改变旋转(360度)的关节角获得不同的关节位置)。一个位置的不同关节坐标称为机器人配置。PUMA机器人配置由三个标志定义:手臂,肘部和手腕。每个标志都有其命令和反馈值:acmd/afbk, ecmd/efbk, wcmd/wfbk。命令值(acmd,ecmd,efbk)描述了运动的给定目标点配置(可以是节点和模态)。反馈值(afbk,efbk,wfbk)表示当前的机器人配置(pfb - value),这些是只读标志。
手臂标志定义了LEFTY或RIGHTY配置:
RIGHTY –正面关节-2将手腕移动到正WORLD Z方向,而关节-3没有被激活
LEFTY– 正面关节-2将手腕移动到'负'WORLD Z方向,而3号关节没有被激活
elbow标志根据下列方式定义了上面或下面的配置:
ABOVE - 臂的手腕相对于肩坐标系的位置具有沿着第二段的Y轴的坐标值。


BELOW - 臂的手腕相对于肩坐标系的位置具有沿着第二连杆的Y轴的值

wrist标志定义FLIP或NOFLIP配置:
---
FLIP – 关节5的值为负
NOFLIP – 关节5的值为正
PUMA机器人的命令配置标志及其对运动的影响:
| 标记(缩写) | |
|
|
| ArmCmd (acmd) | |
|
|
| ElbowCmd (ecmd) | |
|
|
| WristCmd (wcmd) | |
|
|
奇异点
奇异点是无法确定机器人配置的关节点,这些是机器人位置,其中一个关节角度的小差异引入机器人配置的变化。
从世界空间坐标的另一边看,在这些点的附近,位置坐标的小变化可以引起关节坐标的很大变化。 因此,通过这些点移动笛卡尔插值模式(MOVES,PASS-THROUGH,CIRCLE)会导致关节速度的急剧增加。
| WARNING | |
| 注意非零a3参数改变奇点的位置。参考: Elbow_Singularity_of_PUMA_robots |
RX90典型姿态
机器人在"准备位置"的结构外形。关节: {0, -90, 0, 0, 0, 0} 笛卡尔: #{0 , 0 , 985 , 0 , 0 , 0}
机器人在 "零位置"的结构外形。关节: {0,0,0,0,0,0}:笛卡尔: #{450, 0 , 535, 0, 0, 0}
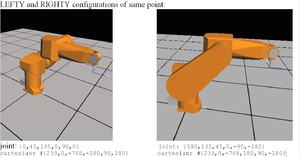
在LEFTY和RIGHTY中相同点的结构外形 关节: {0,45,135,0,90,0} 关节: {180,135,45,0,-90,-180}笛卡尔: #{233,0,-768,-180,90,180} 笛卡尔: #{233,0,-768,180,90,-180}
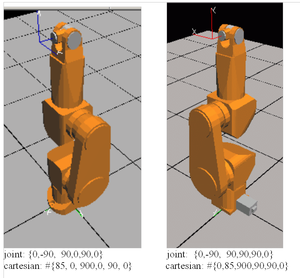
关节: {0,-90, 90,0,90,0} 关节: {0,-90, 90,90,90,0} 笛卡尔: #{85, 0, 900,0, 90, 0} 笛卡尔: #{0,85,900,90,90,0}




通常在机器人中,DH参数用于描述机器人几何形状。 我们使用以下DH参数的定义:
- θ i是绕 z i-1轴(使用右手定则)从xi-1 轴旋转到xi轴的角度。
- α i是绕xi轴(使用右手定则)从z i-1轴旋转到z i轴的角度。
- ai 是从z i-1轴的与 xi轴的交点沿xi轴线的第i个坐标系(或I轴与zi-1和z I之间的最短距离)的原点的偏移距离。
- di是从第(i-1)坐标系的原点沿 z i-1轴从 x i-1轴到xi 轴的距离。


对于RX90系列的Staubli机器人有:
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
机器人的连杆矩阵属性的上述参数必须填写在机器人的设置文件中。为了使系统接受上述设置,必须执行“configgroup”命令。请注意,只有上述参数集才会影响机器人几何形状。'link[][] 和 axis[][] 的其余部分不会以任何方式影响机器人几何形状,并且不受configgroup命令或任何机器人命令的影响。
DH参数的其余部分预先定义如下,并通过选择正确的组模型自动内部设置。
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
姿态角
