Element Synchronization
Contents
Element Synchronization
In the AMCS system there are several ways how to synchronize different elements (axes, groups, robots).
- several axes - combining in a group or using syncstart feature
- mixed axes, groups, robots - using syncstart feature
- robot and an axis - moving frame (conveyor tracking)
There are two types of synchronizations available
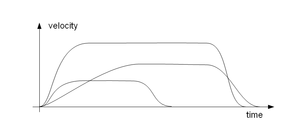
- SyncStart several elements(axes, groups, robots) start the motion at same moment. However the moment of motion end can be different for every element in the list.
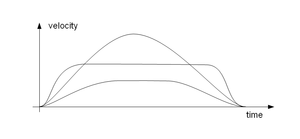
- SyncAll new several elements(axes, groups, robots) start and finish the motion together. Means that all elements will start moving together and end moving at same sample.
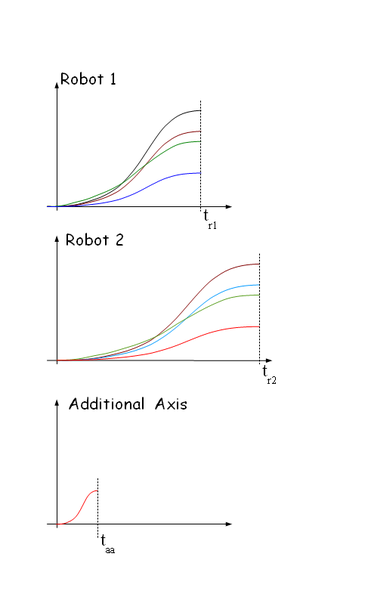
SyncStart
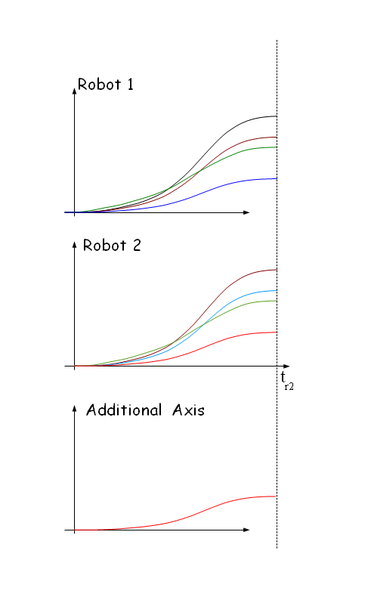
SyncAll


SyncAll
This is new synchronization feature enabling time-synchronization between group of elements (axes,groups,robots) given in arbitrary order. The function synchronizes them in such a way that the starting moment of motion is same for all the given elements and that the finishing moment of movement is same for all the given elements.
It can e seen as a generalization of MOVE <group> command where all axes of a group are synchronized in one motion together. In SyncAll <list> command all elements of a list are synchronized in one motion together.
Here the analogy ends, while in MOVE we have phase-synchronization in SyncAll we just have time-synchronization. Also in MOVE command axes must be a part of a predefined group while in SyncAll command there is nothing that need to be previously defined/declared.
This can be summarized with the following table:
| Command: | |
|
|
|
| MOVE | axes-only | = | = | synchronized |
| SyncStart | elements | = | not-synchronized | |
| SyncAll | elements | = | = | not-synchronized |
Different Synchronization Types:
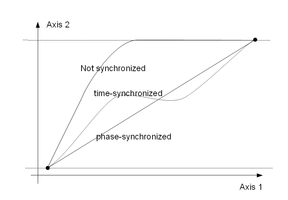
Synchronization Types
Phase Synchronization
Time Synchronization
No Synchronization




Common Synchronization Rules
How it works
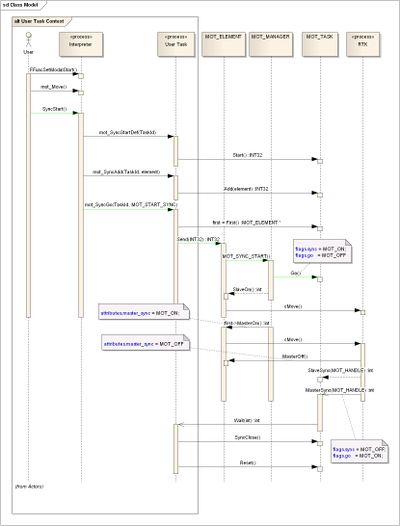
SyncStart Object model
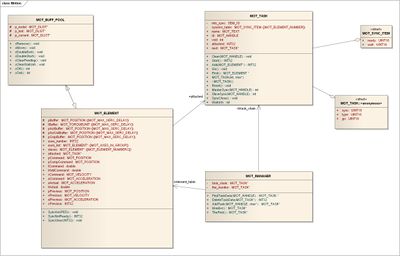
SyncStart Class model

