This page gives an overview over all implemented dynamic models.
General considerations
- Friction is handled on axis basis. The parameters for friction are set for each axis separately.
- Torque (Force) is always expressed in [Nm] ([N])
Rotational Axes
Dynamic Model 1 - simple rotary axis
| Number
|
Parameter
|
Comments
|
| 1
|

|
Total moment of inertia around the rotation axis of the moved part
|
- Model equation
-

Dynamic Model 2 - horizontal crank-arm axis
Horizontal crank-arm axis
| Number
|
Parameter
|
Comments
|
| 1
|
|
Total moment of inertia around the rotation axis of the moved part
|
| 2
|

|
Square of length of crank arm (axis to payload)
|
- Model equation
-

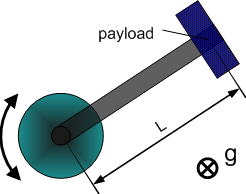
Dynamic Model 3 - vertical crank-arm axis
| Number
|
Parameter
|
Comments
|
| 1
|
|
Total moment of inertia around the rotation axis of the moved part
|
| 2
|
|
Square of length of crank arm (axis to payload)
|
| 3
|

|
Mass (without payload) * Gravity * Distance to center of mass
|
| 4
|

|
Gravity * Distance to Payload
|
- Model equation
-

Linear Axes
Dynamic Model 1 - horizontal axis
| Number
|
Parameter
|
Comments
|
| 1
|

|
Total mass of the moved part.
|
- Model equation
-

Dynamic Model 2 - vertical or tilted axis
| Number
|
Parameter
|
Comments
|
| 1
|
|
Total mass of the moved part.
|
| 2
|

|
Constant force due to gravity.
|
| 3
|

|
Gravity coefficient used to consider payload mass. (g = 9.80665)
|
- Model equation
-

Traverse Arm Robots
Dynamic Model 1
| Number
|
Parameter
|
Comments
|
| 1
|

|
| 2
|

|
| 3
|

|
| 4
|

|
| 5
|

|
| 6
|

|
| 7
|

|
Scara Robots
Dynamic Model 1
| Number
|
Parameter
|
Comments
|
| 1
|

|
| 2
|
|
| 3
|

|
| 4
|

|
| 5
|
|
| 6
|
|
| 7
|
|
| 8
|
|
Delta Robots
Dynamic Model 1
| Number
|
Parameter
|
Comments
|
| 1
|

|
kg*m2
|
| 2
|

|
kg*m2/sec2
|
| 3
|

|
kg
|
| 4
|

|
kg*m2
|
| 5
|

|
kg
|
| 6
|

|
kg
|
| 7
|

|
kg*m2
|
| 8
|

|
kg*m2
|
| 9
|

|
m
|
| 10
|

|
m
|
| 11
|

|
| 12
|

|
| 13
|

|
| 14
|

|
Puma Robots
Dynamic Model 1
Description:
-
 - The gravity constant
- The gravity constant
-
 - The mass of the ith link
- The mass of the ith link
-
 - The length of the ith link
- The length of the ith link
-
 - The distance from the ith joint to the center of mass of the ith link
- The distance from the ith joint to the center of mass of the ith link
| Number
|
Parameter
|
Comments
|
| 1
|


|
kg/m^2
|
| 2
|

|
kg/m^2
|
| 3
|

|
kg/m^2
|
| 4
|

|
kg/m^2
|
Dynamic Model 2 - Gravity
Description:
- - The gravity constant
- - The mass of the ith link
- - The length of the ith link
- - The distance from the ith joint to the center of mass of the ith link
| Number
|
Parameter
|
Comments
|
| 1
|

|
kg*m^2/s^2
|
| 2
|

|
kg*m^2/s^2
|
| 3
|
|
kg*m^2/s^2
|
| 4
|

|
kg*m^2/s^2
|
Galileo Spherical Robots (GSR)
Dynamic Model 1
| Number
|
Parameter
|
Comments
|
| 1
|
mP
|
Payload mass [kg]
|
| 2
|
mB
|
Balance mass [kg]
|
| 3
|
TP
|
Payload mass center distance from the flange [mm]
|
| 4
|
TB
|
Balance mass center distance from the (0,0) [mm]
|
| 5
|
IR
|
Inertia of the payload around roll [kg*m2
|








