Difference between revisions of "Element Synchronization"
m (Text replace - "Axystems:" to "") |
|||
| Line 90: | Line 90: | ||
| − | [[Category | + | [[Category:Synchronization]] |
Revision as of 09:11, 22 May 2014
Contents
Element Synchronization
The softMC system has several ways to synchronize different elements (axes, groups, robots).
- several axes - combining in a group or using syncstart feature
- mixed axes, groups, robots - using syncstart feature
- robot and an axis - moving frame (conveyor tracking)
There are two types of synchronizations available
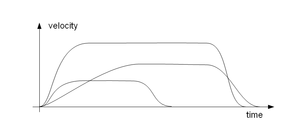
- SyncStart several elements(axes, groups, robots) start the motion at same moment. However the moment of motion end can be different for every element in the list.
- SyncAll several elements(axes, groups, robots) start and finish the motion together. Means that all elements will start moving together and end moving at same sample.
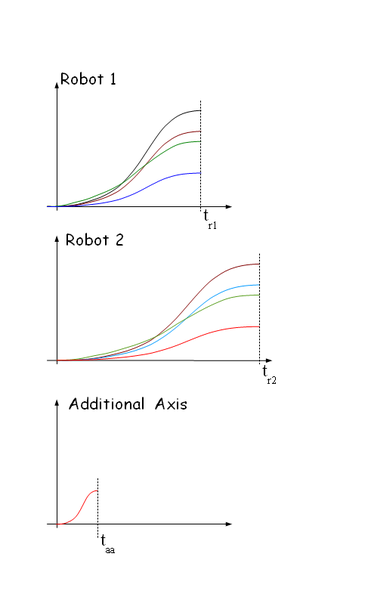
SyncStart
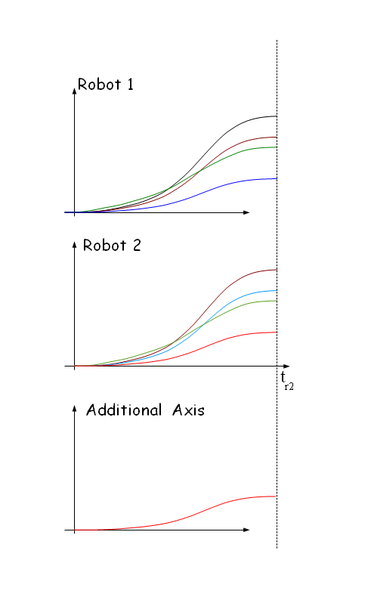
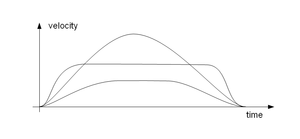
SyncAll


SyncAll
This is new synchronization feature enabling phase-synchronization between list of elements (axes, groups, robots) given in the <sync-list> by an arbitrary order. The function synchronizes them in such a way that they all share the same starting and the finishing moment of the motion.
SyncAll command can be seen as a generalization of MOVE <group> command where all axes of a group are synchronized in one motion together. In SyncAll <list> command all elements of the list are synchronized in one motion together.
In MOVE command axes must be a part of a predefined group while in SyncAll the given elements are independent.
This can be summarized with the following table:
| Command: | |
|
|
|
| MOVE <group> | axes-only | = | = | synchronized |
| SyncStart | elements | = | not-synchronized | |
| SyncAll | elements | = | = | synchronized |
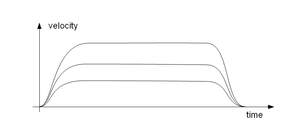
Different Synchronization Types:
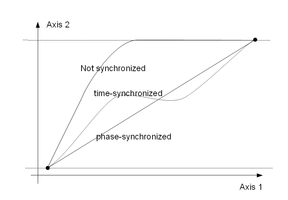
Synchronization Types
Phase Synchronization
Time Synchronization
No Synchronization




| NOTE | |
| Movement can't end with vFinal> 0 |
Common Synchronization Rules
There are common rules for both SyncStart <sync-list> and SyncAll <sync-list> command:
- Axes belonging to an attached group can not be synchronized
- Not executed pending motions issued with starttype = sync are cleared after detach command
- STOP command on an element of the sync-list stops that element only
- Although Move StartType=sync does not execute the motion it however demands that the element is in executable state (i.e. enabled, etc.)
- Synchronization has higher priority than blending (BlendingMethod = 1,2,3).
Clear A Pending Move
If you have loaded a synchronized move in the motion generator and need to delete it, use SYNCCLEAR. For example, if you entered the following command in the above sequence before issuing SYNCSTART:
SyncClear Group1
The Group1 move is deleted. Changing GROUP1.STARTTYPE only affects subsequent moves. You must use SYNCCLEAR to clear pending synchronized moves. SYNCCLEAR has no effect once the move is executing. In this case, you stop the move as you would a non-synchronized move.
How It Works
n - independent profiles are started at same time instance in the same way as it is done in SycnStart case. The only difference that the n-independent elemetns are running on one exactly the same profiler that is copied n-times to each of the element of the <sync-list>.
See: Detailed Design