Difference between revisions of "Limit Switch feature"
| Line 1: | Line 1: | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| + | == Introduction == | ||
| − | + | When using the MC with drives that has limit switches, the following behavior is expected: When the limit switch is pressed: | |
| − | |||
| − | |||
| + | #While the axis is moving, the axis will stop and an error will appear:<br/> '''''Error:''' 3336, "At axis A1. Trying to move towards the limit switch. This movement is not allowed", Task: ,tEthernInp, Line: none, Module: Motion'' | ||
| + | #While the axis is stationary an error will appear:<br/> '''''Error:''' 3335, "At axis A1. Limit Switch is Enabled.", Task: ,tEthernInp, Line: none, Module: Motion'' | ||
| − | + | '''In The Background: '''<br/> The axis enters [[MC-Basic:axis.FOLLOWINGMODE|following mode]] if bit3 jumped from 1 to 0.<br/> The axis exits following mode in the case that the drive is enabled and the PE (in counts units) is smaller than the value of [[MC-Basic:axis.LIMITSWITCHTHRESHOLD|LimitSwitchThreshold]]. | |
| − | |||
| + | In case that the axis was '''stationary''' during limit switch scenario: | ||
| + | #Trying to issue a move in the direction of the pressed limit switch will throw no error since the MC has no information about the direction of the limit switch. Yet, the movement still will not be executed. | ||
| − | + | | |
| − | |||
| − | |||
| + | '''After that, for both cases:''' | ||
| + | #Trying to issue a move in the direction of the pressed limit switch will throw the error:<br/> '''''Error:''' 3336, "At axis A1. Trying to move towards the limit switch. This movement is not allowed", Task: ,tEthernInp, Line: none, Module: Motion'' | ||
| + | #Issuing a movement in the opposite direction of the pressed limit switch will be executed (at any stage). | ||
| + | |||
| + | | ||
{{Note| This feature is disabled during homing cycle}} | {{Note| This feature is disabled during homing cycle}} | ||
| − | {{Note| The LimitSwitchThreshold property default value is set to 100 - [[MC-Basic:axis.LIMITSWITCHTHRESHOLD|More Information]]. | + | {{Note| The LimitSwitchThreshold property default value is set to 100 - [[MC-Basic:axis.LIMITSWITCHTHRESHOLD|More Information]]. }} |
| + | |||
| + | == Configuration == | ||
| − | |||
The Limit Switches digital inputs for each axis should be defined in '''ServoStudio'''. There are 2 options for defining the limit switches: | The Limit Switches digital inputs for each axis should be defined in '''ServoStudio'''. There are 2 options for defining the limit switches: | ||
| + | | ||
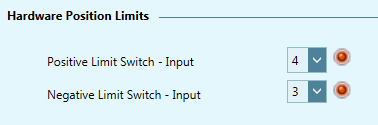
| − | # '''Drive Configuration <big><big>→</big></big> Limits <big><big>→</big></big> Hardware Position Limits''' <br> | + | #'''Drive Configuration <big><big>→</big></big> Limits <big><big>→</big></big> Hardware Position Limits'''<br/> Choose the corresponding digital input to each limit switch:<br/> [[File:LSF 1.png|400px|LSF 1.png]]<br/> |
| − | # '''Drive Configuration <big><big>→</big></big> Digital I/Os <big><big>→</big></big> Digital Inputs''' <br> | + | #'''Drive Configuration <big><big>→</big></big> Digital I/Os <big><big>→</big></big> Digital Inputs'''<br/> Choose the negative and positive limit switch (6 and 5) from the list to the corresponding digital inputs:<br/> [[File:LSF 2.png|450px|LSF 2.png]] |
Latest revision as of 14:04, 21 July 2019
Introduction
When using the MC with drives that has limit switches, the following behavior is expected: When the limit switch is pressed:
- While the axis is moving, the axis will stop and an error will appear:
Error: 3336, "At axis A1. Trying to move towards the limit switch. This movement is not allowed", Task: ,tEthernInp, Line: none, Module: Motion - While the axis is stationary an error will appear:
Error: 3335, "At axis A1. Limit Switch is Enabled.", Task: ,tEthernInp, Line: none, Module: Motion
In The Background:
The axis enters following mode if bit3 jumped from 1 to 0.
The axis exits following mode in the case that the drive is enabled and the PE (in counts units) is smaller than the value of LimitSwitchThreshold.
In case that the axis was stationary during limit switch scenario:
- Trying to issue a move in the direction of the pressed limit switch will throw no error since the MC has no information about the direction of the limit switch. Yet, the movement still will not be executed.
After that, for both cases:
- Trying to issue a move in the direction of the pressed limit switch will throw the error:
Error: 3336, "At axis A1. Trying to move towards the limit switch. This movement is not allowed", Task: ,tEthernInp, Line: none, Module: Motion - Issuing a movement in the opposite direction of the pressed limit switch will be executed (at any stage).
| NOTE | |
| This feature is disabled during homing cycle |
| NOTE | |
| The LimitSwitchThreshold property default value is set to 100 - More Information. |
Configuration
The Limit Switches digital inputs for each axis should be defined in ServoStudio. There are 2 options for defining the limit switches:
- Drive Configuration → Limits → Hardware Position Limits
Choose the corresponding digital input to each limit switch:
- Drive Configuration → Digital I/Os → Digital Inputs
Choose the negative and positive limit switch (6 and 5) from the list to the corresponding digital inputs:

